About Me
I am an enthusiast in Deep Learning, Machine Learning, Reinforcement Learning and Industrial Robots (ROS).
Currently, I am working as a Machine Learning Engineer and Software Developer where I develop and integrate novel Machine Learing and Deep Learning algorithms in the IndustryView SF (Smart Factory) client for intelligent production and tool planning, predictive maintenane and fault detection.
Interests
- Deep Learning
- Reinforcement Learning
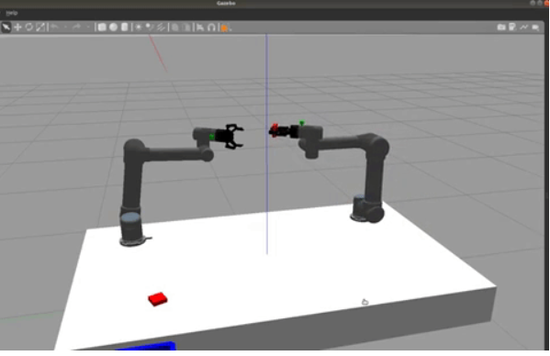
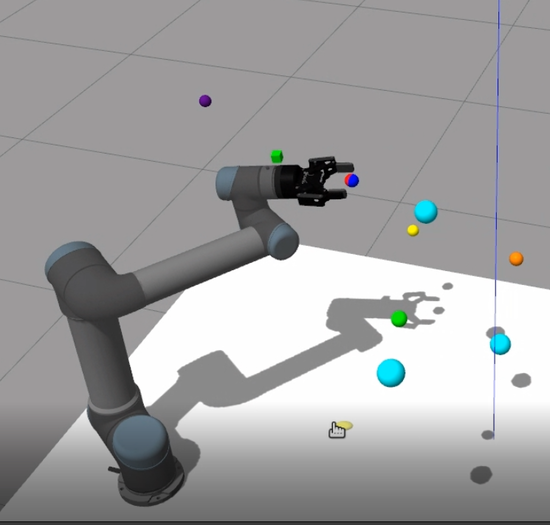
- Industrial Robots
- ROS
- Data Science
- Artificial Intelligence
Education
-
M.Sc. Systems Engineering and Engineering Management, 2020
Fachhochschule Südwestfalen
-
B.E. Mechanical Engineering, 2017
Sri Sairam Engineering College